Lightweight Reinforcement Learning by Evolving Binary Networks
Binary neural networks can gather hundreds of thousands of frames of training data per second on a single CPU, and evolutionary algorithms make training these nondifferentiable models possible.
Heads up: this post has some long equations which don't display well on narrow displays. You might want to switch to landscape mode or a different device to view the equations properly.
Today, reinforcement learning is slow and expensive. Poor sample efficiency, stemming from issues like high-variance gradient estimates and the difficulty of credit assignment, means that agents can require years of experience in an environment to match human performance.
As a result, gathering experience is a key computational bottleneck in reinforcement learning. For each frame of experience,
we must run a forward pass through the model. In real-world problems, this leads to large, expensive, and energy-inefficient
systems for generating rollouts—OpenAI Five used 128,000 CPU cores for gathering experience in the environment and running
evaluation, and 256 GPUs for optimization
Because inference is such a important part of RL, efficiency improvements to the forward pass directly translate to RL models that are easier, faster, and cheaper to train. In this project, I combine binary neural networks, which are very fast but not differentiable, with evolution strategies, a type of gradient-free optimizer that neatly sidesteps the difficulties of training binary models while offering its own advantages for reinforcement learning.
Binary Neural Networks
Binary neural networks have weights and activations constrained to values +1 or -1.
The weights, inputs, and outputs of a layer are binary in the sense of having two possible values, ±1, but to run the model on standard computing hardware we encode them as the more familiar 0/1 binary numbers by representing -1 as 0 (and 1 as itself). With this encoding, we can fit an entire 64-vector into a single 64-bit quadword. SIMD instructions can operate very efficiently on “packed” vectors of this kind.
The XNOR Trick
There’s a clever trick
![An example of the XNOR trick computing the dot product of [1, 1, -1, -1] and [1, 1, 1, -1], demonstrating that the arithmetic is the same in both cases.](/assets/posts/binary-evolution/xnor-trick.svg)
Since we’re encoding these vectors as 0/1 bit vectors, \(a \text{ XNOR } b\) is precisely 1 where \(a\) matches \(b\) and 0 where it doesn’t, so we can compute the dot product as \(a \cdot b = 2 \text{ popcount}\left(a\text{ XNOR } b\right) - N\). This takes just a few instructions and is very SIMD-friendly. Since matrix multiplication, convolution, and most other important operations for neural networks are made up of dot products, this makes the forward pass of a binary neural network very fast overall.
Training Binary Networks
However, binary neural networks are discrete-valued, which precludes training them with gradient descent and backpropagation.
One solution, used by approaches like XNOR-Net
In this project, I took a different approach: training binary neural networks directly, without gradient approximation or backpropagation. To do this, I used evolution strategies, a type of optimizer that does not require gradients.
Evolution Strategies for Binary Neural Networks
Evolution strategies (ES) are a family of derivative-free optimizers that maintain a search distribution: a probability
distribution over possible solutions.
ES has a number of other appealing properties in RL
In this project, I used natural evolution strategies
A Distribution Over Binary Neural Networks
In this project, the search distribution is a distribution over the weights of binary neural networks. To keep things simple, I modeled each binary weight as an independent Bernoulli random variable. That is, for each weight \(i\) in the binary network we maintain a parameter \(p_i\), the probability of that weight being 1.
To ensure that these probabilities remain valid \(\left(0 \leq p_i \leq 1\right)\) as the parameters are adjusted by the optimization algorithm, I reparameterized them as \(p_i = \sigma(x_i)\), where \(\sigma\) is the sigmoid function and the parameters \(x_i\) may be any real number. I tried a few schemes for initializing these parameters, but in general the best solution was to initialize each \(x_i\) such that every bit is initially 0 or 1 with equal probability.
For the biases, which are integers, I used a factorized Gaussian distribution, with parameters
\(\mu_i\) and \(\sigma_i\) for the mean and standard deviation of the \(i\)-th bias.
So, our binary neural networks will have weights and biases
\[\theta = \left[ w_1, \ldots, w_N, b_1, \ldots, b_M \right],\]which are sampled from the search distribution. The complete parameter vector defining the search distribution is
\[\phi = \left[ x_1, \ldots, x_N, \mu_1, \ldots, \mu_M, \sigma_1, \ldots, \sigma_M \right],\]and the probability density for the search distribution is
\(P(\theta \mid \phi) = \left( \prod_{i=1}^N \sigma(x_i)^{w_i} (1 - \sigma(x_i))^{1 - w_i} \right) \left( \prod_{i=1}^M \frac{1}{\sigma_i \sqrt{2 \pi}} \exp \left( -\frac{1}{2} \left( \frac{b_i - \mu_i}{\sigma_i} \right)^2 \right) \right) .\)
Updating the Search Distribution
Natural ES kind of acts like a policy gradient algorithm, except the “policy” is the search distribution, and the “actions” it takes are parameter vectors \(\theta\) for a model we try in the environment. The goal is to maximize the expected value of \(R(\theta)\), a function which accepts the parameters of an agent as input, runs that agent in the environment, and returns the total reward the agent achieved. It performs this maximization by updating \(\phi\) through gradient ascent.
This idea is often called Parameter-exploring Policy Gradients
using the log-derivative trick, and estimate this
expectation with a finite Monte Carlo sample of models from the search distribution. If this looks almost identical to
REINFORCE, that’s because it is—the idea of updating a search distribution like this was proposed in the original REINFORCE
paper
Because the search distribution is totally separable, we can compute each parameter gradient separately. So, the gradients we need are the following:
\[\begin{equation} \frac{\partial}{\partial \mu_i} \log \mathcal{N}(b_i \mid \mu_i, \sigma_i) = \frac{b_i - \mu_i}{\sigma_i^2} \end{equation}\] \[\begin{equation} \frac{\partial}{\partial \sigma_i} \log \mathcal{N}(b_i \mid \mu_i, \sigma_i) = \frac{(b_i - \mu_i)^2 - \sigma_i^2}{\sigma_i^3} \end{equation}\] \[\begin{equation} \frac{\partial}{\partial x_i} \log P(w_i \mid x_i) = w_i - \sigma(x_i). \label{eqn:3} \end{equation}\]The first two are derived in the REINFORCE paper, and I derive \(\eqref{eqn:3}\) in the appendix. As I mentioned above, the biases must be integers, so I round them during the forward pass and use the gradients computed at that point as an approximation to the true gradient.
The Complete Algorithm
In summary, one iteration proceeds as follows:
- Sample a population of binary neural networks, \(\theta_1 \ldots \theta_T\), from \(P( \theta \mid \phi\)).
- Run each agent in the environment using binary encoding and the XNOR trick, and record the total return it achieves, \(R(\theta_i )\).
Results
Fast Learning on Easy Problems
I was consistently surprised by just how fast binary neural networks are in practice. A two-layer, 64-unit-wide binary network clocked in at 500,000 forward passes per second on my laptop’s CPU, 25 times faster than an equivalent model in PyTorch. Training on easy problems like CartPole was quick too—the model at the start of this article trained in under one minute on CPU.
For fast learning, I found it essential to represent the observations from the environment in a good way. This was particularly tricky because the model only accepts binary vectors as input. For CartPole, it was sufficient to put objects’ positions and velocities into one of several “bins,” but making progress on other environments required more careful feature engineering. I also tried training the model from the raw binary encodings of the positions and velocities, but that didn’t work at all.
Failure to Converge on Hard Problems
However, although this approach made some progress on all of the environments I tried it on, it wasn’t able to completely solve any environment harder than CartPole. Below, I discuss some problems that I think are responsible for this.
Limitations
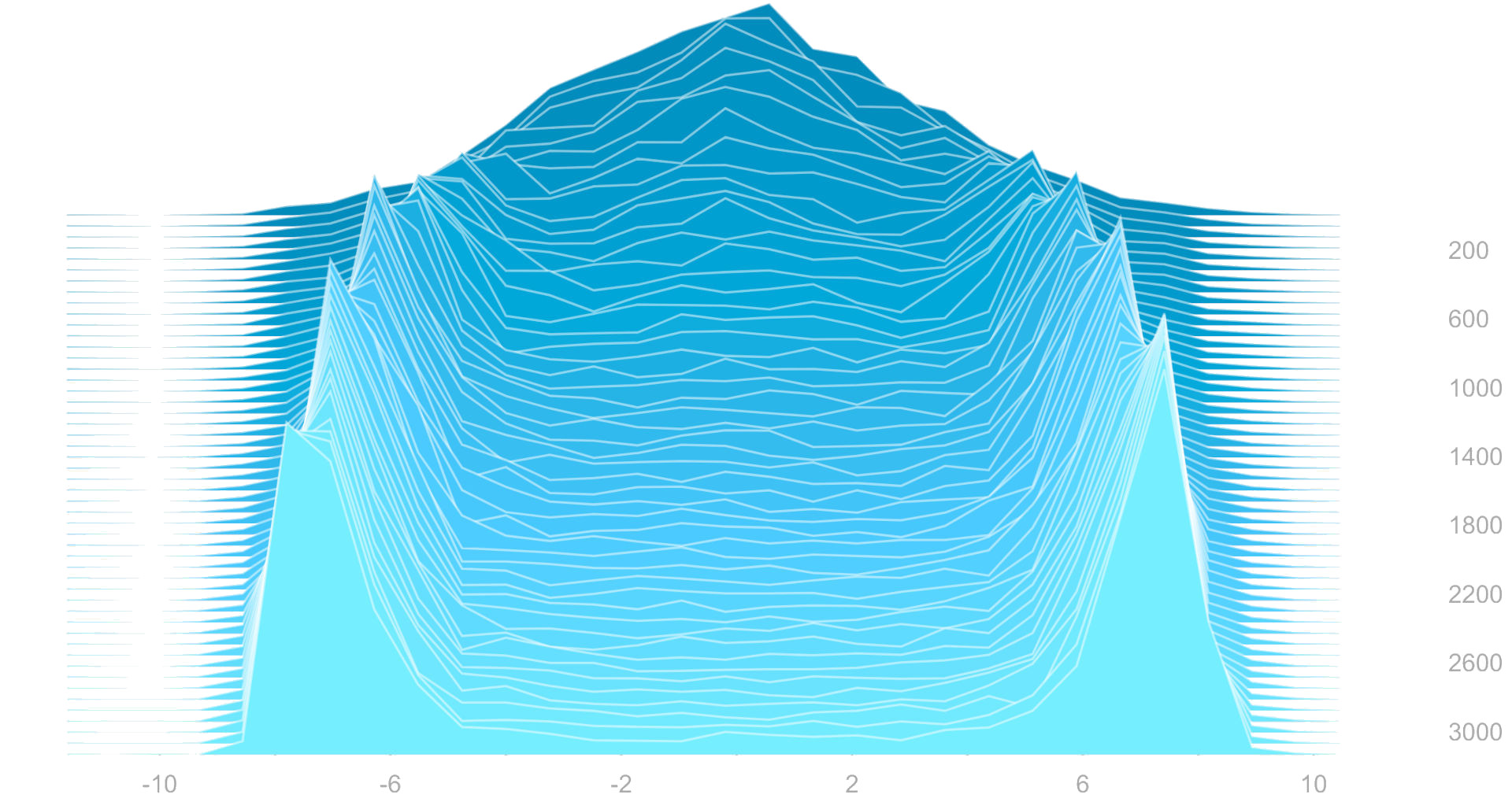
Variance Collapse
The biggest issue I noticed was that binary weights stop exploring once they learn. When a parameter \(x_i\) grows large, weight \(w_i\) will be the same in almost every sample. As training progresses and the search distribution gains confidence in which bits should be active, the algorithm as a whole stops exploring, and performance stops improving beyond a point.
I’ve tried a few things to combat this tendency. Shrinking the bit probabilities towards 0.5 (or equivalently, weight decay on the \(w\) parameters) did a good job extending the time before learning plateaued, as did lowering the learning rate. I also experimented with holding the variance of the bias distribution constant instead of adjusting \(\sigma_i\), similar to OpenAI’s work with ES. Ultimately, though, CartPole was the only environment where the model reliably finished training before it converged to a low-variance regime and stopped learning.
Independence Assumptions
The search distribution I used makes strong independendence assumptions about the network parameters. The parameters definitely aren’t independent, though, leaving information on the table that the search distribution might be able to use to search more efficiently. There are other variants of evolution strategies that do consider covariance between the parameters, such as Covariance Matrix Adaptation ES, but they require second-order information that’s intractible to compute for larger models.
High-Dimensional Search Space
High-dimensional gradients are really amazing. Part of deep learning’s success is that even for models with millions of parameters, the gradient tells each of them how to change and coordinate. Evolution strategies don’t share this scalability, though — they explore parameter space by testing a few random directions around the current solution. This leads to high-variance gradient estimates as the dimensionality of the search space grows.
One reason that ES has seen some success in reinforcement learning is that the true gradient of performance is not available, and must be estimated even for approaches using backpropagation. However, given the success of very large models in other domains, it may be the case that exploring directly in parameter space with ES becomes infeasible for the models required to solve some problems.
Conclusion
For reinforcement learning in challenging environments, massively distributed training across thousands of computers is currently the norm. As we begin to tackle new and harder problems, we can only expect the computational requirements to grow. However, evolution strategies and binary neural networks may provide a more computationally-tractable way of training RL agents.
Building on prior work that investigates scaling ES in a distributed setting
Proof of \eqref{eqn:3}
If $w_i = 1$, then $$ \begin{align*} \frac{\partial}{\partial x_i} \log P(w_i \mid x_i) &= \frac{\partial}{\partial x_i} \log \sigma(x_i) \\\\ &= \frac{1}{\sigma(x_i)} \cdot \sigma(x_i) (1 - \sigma(x_i)) \\\\ &= 1 - \sigma(x_i). \end{align*} $$ If $w_i = 0$, then $$ \begin{align*} \frac{\partial}{\partial x_i} \log P(w_i \mid x_i) &= \frac{\partial}{\partial x_i} \log (1 - \sigma(x_i)) \\\\ &= \frac{1}{1 - \sigma(x_i)} \cdot -1 \cdot \sigma(x_i) (1 - \sigma(x_i)) \\\\ &= -\sigma(x_i). \end{align*} $$ So, we can write $\frac{\partial}{\partial x_i} \log P(w_i \mid x_i ) = w_i - \sigma(x_i).$